基础设施(2)(还未全完成
trace系列暂时待填坑。。。。
NEMU是一个用来执行其它程序的程序. 在可计算理论中, 这种程序有一个专门的名词, 叫通用程序(Universal Program),
NEMU和各种模拟器只不过是通用程序的实例化, 我们也可以毫不夸张地说, 计算机就是一个通用程序的实体化. 通用程序的存在性为计算机的出现奠定了理论基础, 是可计算理论中一个极其重要的结论,
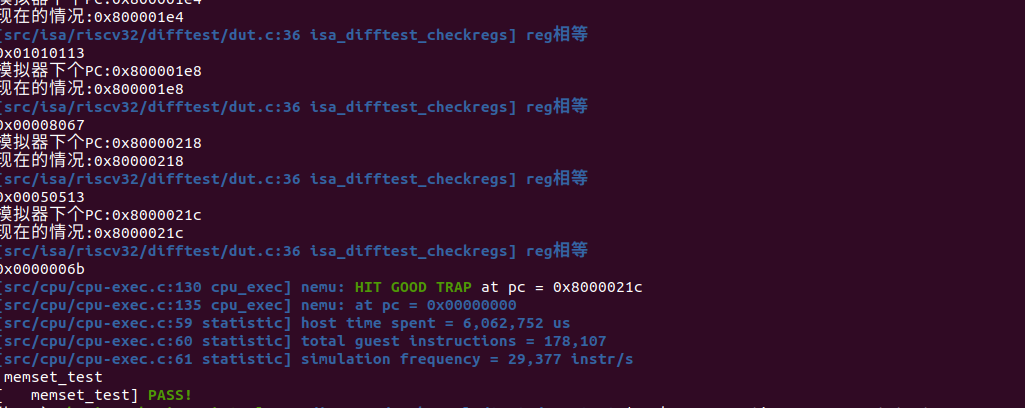
memset通过测试
推荐阅读 计算的极限:
https://zhuanlan.zhihu.com/p/270155475
阅读相关Makefile, 尝试理解abstract-machine是如何生成native的可执行文件的.
待补充
奇怪的错误码
为什么错误码是1呢? 你知道make程序是如何得到这个错误码的吗?
别高兴太早了, 框架代码编译到native的时候默认链接到glibc, 我们需要把这些库函数的调用链接到我们编写的klib来进行测试. 我们可以通过在abstract-machine/klib/include/klib.h 中通过定义宏__NATIVE_USE_KLIB__来把库函数链接到klib. 如果不定义这个宏, 库函数将会链接到glibc, 可以作为正确的参考实现来进行对比.
待补充
这是如何实现的?
为什么定义宏__NATIVE_USE_KLIB__之后就可以把native上的这些库函数链接到klib? 这具体是如何发生的? 尝试根据你在课堂上学习的链接相关的知识解释这一现象.
待补充
输入输出
设备与CPU
要向设备发送一些有意义的数字信号, 设备就会按照这些信号的含义来工作. 让一些信号来指导设备如何工作, 这不就像"程序的指令指导CPU如何工作"一样吗? 恰恰就是这样! 设备也有自己的状态寄存器(相当于CPU的寄存器), 也有自己的功能部件(相当于CPU的运算器). 当然不同的设备有不同的功能部件, 例如键盘有一个把按键的模拟信号转换成扫描码的部件, 而VGA则有一个把像素颜色信息转换成显示器模拟信号的部件. 控制设备工作的信号称为"命令字", 可以理解成【设备的指令】, 设备的工作就是负责接收命令字, 并进行译码和执行… 你已经知道CPU的工作方式, 这一切对你来说都太熟悉了.
所谓的访问设备, 说白了就是从设备获取数据(输入), 比如从键盘控制器获取按键扫描码, 或者是向设备发送数据(输出), 比如向显存写入图像的颜色信息. 但是, 如果万一用户没有敲键盘, 或者是用户想调整屏幕的分辨率, 怎么办呢? 这说明, 除了纯粹的数据读写之外, 我们还需要对设备进行控制: 比如需要获取键盘控制器的状态, 查看当前是否有按键被按下; 或者是需要有方式可以查询或设置VGA控制器的分辨率.
所以, 在程序看来,访问设备 = 读出数据 + 写入数据 + 控制状态.
既然设备也有寄存器, 一种最简单的方法就是把设备的寄存器作为接口, 让CPU来访问这些寄存器.
CPU要如何访问设备寄存器呢? 我们先来回顾一下CPU是如何访问CPU自己的寄存器的: 首先给这些寄存器编个号, 比如
eax是0,ecx是1… 然后在指令中引用这些编号, 电路上会有相应的选择器, 来选择相应的寄存器并进行读写. 对设备寄存器的访问也是类似的: 我们也可以给设备中允许CPU访问的寄存器逐一编号, 然后通过指令来引用这些编号. 设备中可能会有一些私有寄存器, 它们是由设备自己维护的, 它们没有这样的编号, CPU不能直接访问它们.这些编号也称为设备的地址. 常用的编址方式有两种:端口I/O、內存映射I/O
端口I/O
端口映射I/O(port-mapped I/O), CPU使用专门的I/O指令对设备进行访问, 并把设备的地址称作端口号. 有了端口号以后, 在I/O指令中给出端口号, 就知道要访问哪一个设备寄存器了. 市场上的计算机绝大多数都是IBM PC兼容机, IBM PC兼容机对常见设备端口号的分配有专门的规定.
x86提供了
in和out指令用于访问设备, 其中in指令用于将设备寄存器中的数据传输到CPU寄存器中,out指令用于将CPU寄存器中的数据传送到设备寄存器中.movl $0x41, %al
movl $0x3f8, %edx
outb %al, (%dx)
上述代码把数据0x41传送到0x3f8号端口所对应的设备寄存器中. CPU执行上述代码后, 会将0x41这个数据传送到串口的一个寄存器中, 串口接收之后, 发现是要输出一个字符
A; 但对CPU来说, 它并不关心设备会怎么处理0x41这个数据, 只会老老实实地把0x41传送到0x3f8号端口. 事实上, 设备的API及其行为都会在相应的文档里面有清晰的定义, 在PA中我们无需了解这些细节, 只需要知道, 驱动开发者可以通过RTFM, 来编写相应程序来访问设备即可.API, 行为, RTFM… 没错, 我们又再次看到了计算机系统设计的一个例子: 设备向CPU暴露设备寄存器的接口, 把设备内部的复杂行为(甚至一些模拟电路的特性)进行抽象, CPU只需要使用这一接口访问设备, 就可以实现期望的功能. 计算机系统处处蕴含抽象的思想, 只要理解其中的原理, 再加上RTFM的技能, 你就能掌握计算机系统的全部!
內存映射I/O
端口映射I/O把端口号作为I/O指令的一部分, 这种方法很简单, 但同时也是它最大的缺点. 指令集为了兼容已经开发的程序, 是只能添加但不能修改的.这意味着, 端口映射I/O所能访问的I/O地址空间的大小, 在设计I/O指令的那一刻就已经决定下来了. 所谓I/O地址空间, 其实就是所有能访问的设备的地址的集合. 随着设备越来越多, 功能也越来越复杂, I/O地址空间有限的端口映射I/O已经逐渐不能满足需求了. 有的设备需要让CPU访问一段较大的连续存储空间, 如VGA的显存, 24色加上Alpha通道的1024x768分辨率的显存就需要3MB的编址范围. 于是内存映射I/O(memory-mapped I/O, MMIO)应运而生.
编址方式将一部分物理内存的访问"重定向"到I/O地址空间中, CPU尝试访问这部分物理内存的时候, 实际上最终是访问了相应的I/O设备,
现代计算机都已经是64位计算机, 物理地址线都有48根,
(注意64位并不需要2的64次方,而是48就够了,因为过大空间导致了资源浪费。32位的时候寻址是32次方。每个地址总线可以对两个存储单元寻址,确定两种状态(0或1)1GB是2的30次方Byte,1TB是2的40次方B,再乘上256即2的8次方即是)
这意味着物理地址空间有256TB这么大, 从里面划出3MB的地址空间给显存, 根本就是不痛不痒. 正因为如此, 内存映射I/O成为了现代计算机主流的I/O编址方式: RISC架构只提供内存映射I/O的编址方式, 而PCI-e, 网卡, x86的APIC等主流设备, 都支持通过内存映射I/O来访问.
作为RISC架构, mips32和riscv32都是采用内存映射I/O的编址方式. 对x86来说, 内存映射I/O的一个例子是NEMU中的物理地址区间
[0xa1000000, 0xa1800000). 这段物理地址区间被映射到VGA内部的显存, 读写这段物理地址区间就相当于对读写VGA显存的数据. 例如memset((void *)0xa1000000, 0, SCR_SIZE);
会将显存中一个屏幕大小的数据清零, 即往整个屏幕写入黑色像素, 作用相当于清屏. 可以看到, 内存映射I/O的编程模型和普通的编程完全一样: 程序员可以直接把I/O设备当做内存来访问. 这一特性也是深受驱动开发者的喜爱.
状态机视角下的输入输出
我们可以把设备分成两部分, 一部分是数字电路. 我们刚才粗略地介绍了一些设备控制器的功能, 例如我们CPU可以从键盘控制器中读出按键信息. 既然是数字电路, 我们就可以把其中的时序逻辑电路看成是设备数字电路部分的状态D.
但D比较特殊, 计算机只能通过端口I/O指令或者内存映射I/O的访存指令来访问和修改.
有意思的是设备的另一部分: 模拟电路, 它也可以改变D. 例如键盘通过检查按键位置的电容变化来判断是否有按键被按下, 若有, 则会将按键信息写入到键盘控制器的寄存器中. 而按键位置的电容是否发生变化, 又是由物理世界中的用户是否按下按键决定的. 所以我们会说, 设备是连接计算机和物理世界的桥梁.
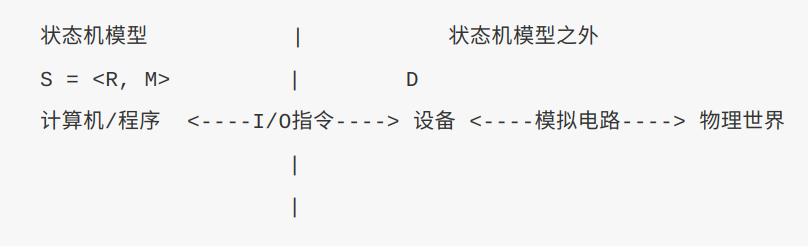
要对设备的状态和行为进行建模是一件很困难的事情, 除了设备本身的行为五花八门之外, 设备的状态还时时刻刻受到物理世界的影响. 于是, 我们在对状态机模型的行为进行扩展的时候, 并不考虑将D加入到S中, 而是仅仅对输入输出相关指令的行为进行建模:
通过内存进行数据交互的输入输出
我们知道
S = <R, M>, 上文介绍的端口I/O和内存映射I/O都是通过寄存器R来进行数据交互的. 很自然地, 我们可以考虑, 有没有通过内存来进行数据交互的输入输出方式呢?其实是有的, 这种方式叫DMA. 为了提高性能, 一些复杂的设备一般都会带有DMA的功能. 不过在NEMU中的设备都比较简单, 关于DMA的细节我们就不展开介绍了.
NEMU中的输入输出
终于进入紧张刺激的正式话题!
NEMU的框架代码已经在nemu/src/device/目录下提供了设备相关的代码,
映射和I/O方式
这部分蛮重要的,多读读原文把,可以在之后回头读。
设备
NEMU使用SDL库来实现设备的模拟,
nemu/src/device/device.c含有和SDL库相关的代码.init_device()函数主要进行以下工作:
- 调用
init_map()进行初始化.
cpu_exec()在执行每条指令之后就会调用device_update()函数, 这个函数首先会检查距离上次设备更新是否已经超过一定时间, 若是, 则会尝试刷新屏幕, 并进一步检查是否有按键按下/释放, 以及是否点击了窗口的按钮; 否则则直接返回, 避免检查过于频繁, 因为上述事件发生的频率是很低的.
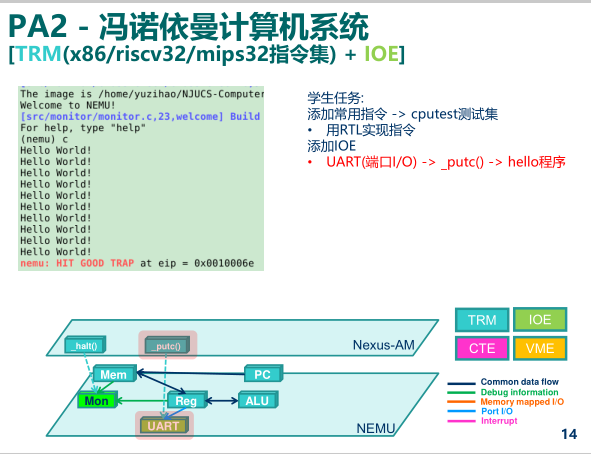
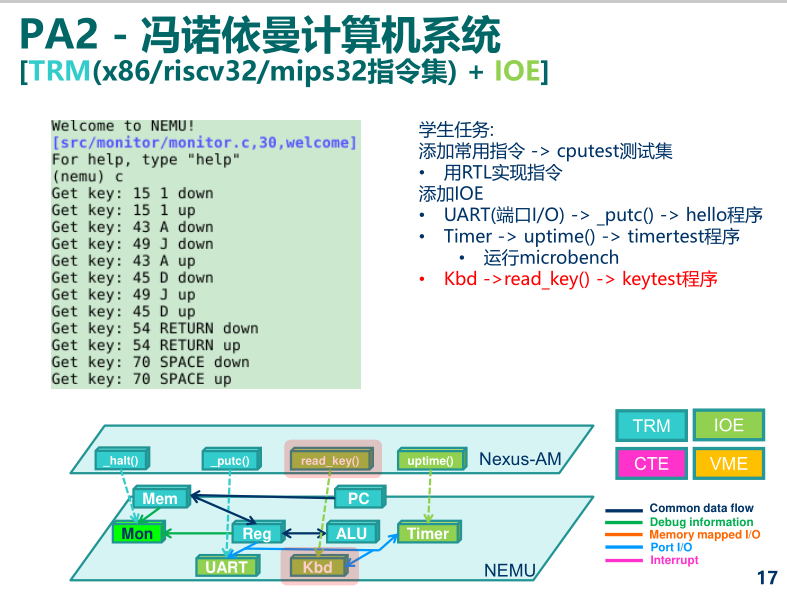
将输入输出抽象成IOE
设备访问的具体实现是架构相关的, 比如NEMU的VGA显存位于物理地址区间[0xa1000000, 0xa1080000), 但对native的程序来说, 这是一个不可访问的非法区间, 因此native程序需要通过别的方式来实现类似的功能. 自然地, 设备访问这一架构相关的功能, 应该归入AM中. 与TRM不同, 设备访问是为计算机提供输入输出的功能, 因此我们把它们划入一类新的API, 名字叫IOE(I/O Extension).
访问设备其实想做什么: 访问设备 = 读出数据 + 写入数据 + 控制状态. 进一步的, 控制状态本质上也是读/写设备寄存器的操作, 所以访问设备 = 读/写操作.
bool ioe_init();
void ioe_read(int reg, void *buf);
void ioe_write(int reg, void *buf);
第一个API用于进行IOE相关的初始化操作. 后两个API分别用于从编号为
reg的寄存器中读出内容到缓冲区buf中, 以及往编号为reg寄存器中写入缓冲区buf中的内容.【这里的
reg寄存器并不是上文讨论的设备寄存器, 因为设备寄存器的编号是架构相关的.】
abstract-machine/am/include/amdev.h中定义了常见设备的"抽象寄存器"编号和相应的结构. 这些定义是架构无关的, 每个架构在实现各自的IOE API时, 都需要遵循这些定义(约定).NEMU作为一个平台, 设备的行为是与ISA无关的, 只需要在
abstract-machine/am/src/platform/nemu/ioe/目录下实现一份IOE, 来供NEMU平台的架构共享. 其中,abstract-machine/am/src/platform/nemu/ioe/ioe.c中实现了上述的三个IOE API,ioe_read()和ioe_write()都是通过抽象寄存器的编号索引到一个处理函数, 然后调用它. 处理函数的具体功能和寄存器编号相关, 下面我们来逐一介绍NEMU中每个设备的功能.
一些重要的文件、函数记录
代码框架可参考:https://ysyx.oscc.cc/forum/topic/16/pa2-3-nemu-am-am-kernels共同构建的虚拟世界概念图
随着代码复杂度越来越高,对框架的熟悉度要求指数上涨,必须开始记录每个框架的功能及其使用方式:
基础文件
-
指令集相关文件:
-
各类指令RTL调用函数实现部分:/home/physico/ics2021/nemu/src/isa/riscv32/instr/ *.h
-
译码函数部分:/home/physico/ics2021/nemu/src/isa/riscv32/instr/decode.c
-
函数名-宏展开需要部分:/home/physico/ics2021/nemu/src/isa/riscv32/include/isa-all-instr.h(旁边的isa-exec可以包括1提到的)
-
ISADecodeInfo:/home/physico/ics2021/nemu/src/isa/riscv32/include/isa-def.h
-
RTL实现相关:
-
/home/physico/ics2021/nemu/src/engine/interpreter/rtl-basic.h (def_rtl_compute_reg_imm)
-
/home/physico/ics2021/nemu/src/engine/interpreter/c_op.h(c_add(a, b) ((a) + (b)) 以及 interpret_relop类似RELOP_NE)
-
-
调试测试用指令与文件(我以自己的路径为准)
-
IOE(包括时间等):
地址:/home/physico/ics2021/am-kernels/tests/am-tests
测试方式:make ARCH=riscv32-nemu run mainargs=t (其他测试方式自行读代码)
-
benchmark测试:
地址:/home/physico/ics2021/am-kernels/benchmarks/microbench
测试方式:make ARCH=riscv32-nemu run (其他benchmark同样方法可测)
-
马里奥测试:
地址:home/physico/ics2021/fceux-am
测试方式: make ARCH=riscv32-nemu run mainargs=mario
设备相关文件:
-
时钟:
-
AM的相关实现:
- /home/physico/ics2021/abstract-machine/am/src/platform/nemu/ioe/timer.c (需要实现)
-
native的相关实现
- /home/physico/ics2021/abstract-machine/am/src/native/ioe/timer.c
-
nemu的相关实现:
-
/home/physico/ics2021/nemu/src/device/timer.c
-
/home/physico/ics2021/nemu/src/utils/timer.c
-
-
串口
nemu/src/device/serial.c模拟了串口的功能. 其大部分功能也被简化, 只保留了数据寄存器. 串口初始化时会分别注册0x3F8处长度为8个字节的端口, 以及0xa00003F8处长度为8字节的MMIO空间, 它们都会映射到串口的数据寄存器.由于NEMU串行模拟计算机系统的工作, 串口的状态寄存器可以一直处于空闲状态; 每当CPU往数据寄存器中写入数据时, 串口会将数据传送到主机的标准错误流进行输出.
abstract-machine/am/src/platform/nemu/trm.c中的putch()会将字符输出到串口.
可以配合vsprintf做成Printf。
理解mainargs
请你通过RTFSC理解这个参数是如何从make命令中传递到hello程序中的, $ISA-nemu和native采用了不同的传递方法, 都值得你去了解一下.
答:
ISA-NEMU通过ics2021/abstract-machine/scripts/platform/nemu.mk中的宏定义:-D
CFLAGS += -DMAINARGS=\"$(mainargs)\“然后就在main(mainargs)
时钟【埋了大坑】
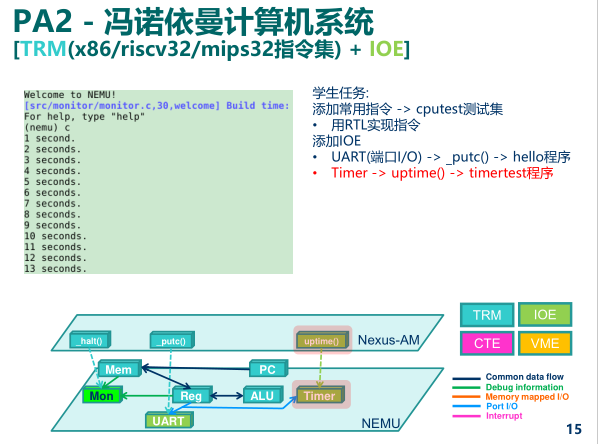
有了时钟, 程序才可以提供时间相关的体验, 例如游戏的帧率, 程序的快慢等. nemu/src/device/timer.c模拟了i8253计时器的功能. 计时器的大部分功能都被简化, 只保留了"发起时钟中断"的功能(目前我们不会用到). 同时添加了一个自定义的时钟. i8253计时器初始化时会分别注册0x48处长度为8个字节的端口, 以及0xa0000048处长度为8字节的MMIO空间, 它们都会映射到RTC寄存器. CPU可以访问这两个寄存器来获得当前时间.
abstract-machine/am/include/amdev.h中为时钟的功能定义了两个抽象寄存器:
-
AM_TIMER_RTC, AM实时时钟(RTC, Real Time Clock), 可读出当前的年月日时分秒. PA中暂不使用. -
AM_TIMER_UPTIME, AM系统启动时间, 可读出系统启动后的微秒数.
实现IOE
在
abstract-machine/am/src/platform/nemu/ioe/timer.c中实现AM_TIMER_UPTIME的功能. 在abstract-machine/am/src/platform/nemu/include/nemu.h和abstract-machine/am/src/$ISA/$ISA.h中有一些输入输出相关的代码供你使用.实现后, 在
$ISA-nemu中运行am-kernel/tests/am-tests中的real-time clock test测试. 如果你的实现正确, 你将会看到程序每隔1秒往终端输出一行信息. 由于我们没有实现AM_TIMER_RTC, 测试总是输出1900年0月0日0时0分0秒, 这属于正常行为, 可以忽略.
native的IOE是基于SDL库实现的, 它们假设常用库函数的行为会符合glibc标准, 但我们自己实现的klib通常不能满足这一要求. 因此__NATIVE_USE_KLIB__仅供测试klib实现的时候使用, 我们不要求在定义__NATIVE_USE_KLIB__的情况下正确运行所有程序.
这里我卡了一段时间(主要是跑分过高甚至有些跑不了。),我参考了一生一芯论坛某个大佬的思路:
https://ysyx.oscc.cc/forum/topic/56/pa2-3实现时钟为例的一些rtsc思路
解决时钟问题的钥匙——理解更新过程
我们需要思考,内存映射的逻辑是什么,为什么我们通过学习类似abstract-machine/am/src/platform/nemu/ioe/timer.c 的方法能够读出数据?或者使用文档里让我们看文件中的读写方式能够读出时间数据?(具体可以看上面那个大佬的思路)关键在于——时间是被更新到地址上的,那么什么造成了地址对应数据的更新?讲义给出了答案,让我们反复阅读映射和IO方式:
框架代码为映射定义了一个结构体类型
IOMap(在nemu/include/device/map.h中定义), 包括名字, 映射的起始地址和结束地址, 映射的目标空间, 以及一个回调函数.
nemu/src/device/io/map.c实现了映射的管理, 包括I/O空间的分配及其映射, 还有映射的访问接口.其中
map_read()和map_write()用于将地址addr映射到所指示的目标空间, 并进行访问. 访问时, 可能会触发相应的回调函数, 对设备和目标空间的状态进行更新.
nemu/src/device/io/port-io.c是对端口映射I/O的模拟.add_pio_map()函数用于为设备的初始化注册一个端口映射I/O的映射关系.pio_read()和pio_write()是面向CPU的端口I/O读写接口, 它们最终会调用map_read()和map_write(), 对通过注册的I/O空间进行访问.
这时候我们就会想到,这个对设备和目标空间状态更新的函数,对时钟来说,是什么呢?
注意到———— nemu/src/device/timer.c模拟了i8253计时器的功能
此时进入后会发现熟悉的add_pio_map,还有一个rtc_io_handler这里出现了gettime! 感觉是我们想要的答案,但此时会发现一个offset,那么这个offset到底是什么呢,让我们继续打开add_pio_map,继续一路寻找用到callback的地方会发现回到了map,其中的map_read的write告诉了我们原来在这里传入callback,其中offset也就不言而喻了。
得知offset = addr - map->low后,我们再倒回去看某个函数就显得可疑了, addr 可以就是 map->low,也可以是low+4。那么哪个才是对的呢?让我们再复习这句话:
其中
map_read()和map_write()用于将地址addr映射到所指示的目标空间, 并进行访问. 访问时, 可能会触发相应的回调函数, 对设备和目标空间的状态进行更新.
这时候问题就变成addr到底是等于什么的时候更新才是对的呢?我们怎么访问地址更新数据才是正确的?
这个访问会对我们读取时钟数据有什么影响?我们读取地址上的时钟数据的时候是怎么做的?
在反复阅读一下前面大佬分享的RTFC的过程,相信你能得到答案。
键盘
这部分只要弄懂了时钟,非常简单。
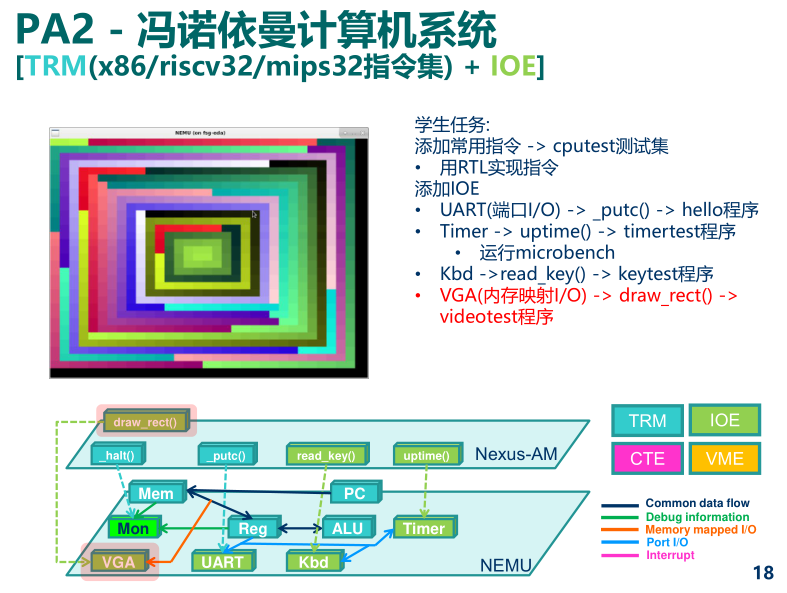
VGA
现代的显示器一般都支持24位的颜色(R, G, B各占8个bit, 共有2^8*2^8*2^8约1600万种颜色)
为了让屏幕显示不同的颜色成为可能, 在8位颜色深度时会使用调色板的概念. 调色板是一个颜色信息的数组, 每一个元素占4个字节, 分别代表R(red), G(green), B(blue), A(alpha)的值
一个像素存储的就不再是颜色的信息, 而是一个调色板的索引
要得到一个像素的颜色信息, 就要把它的值当作下标, 在调色板这个数组中做下标运算, 取出相应的颜色信息. 因此, 只要使用不同的调色板, 就可以在不同的时刻使用不同的256种颜色了.
Q:在一些90年代的游戏中(比如仙剑奇侠传), 很多渐出渐入效果都是通过调色板实现的, 聪明的你知道其中的玄机吗?
A:通过线性改变索引?
在NEMU中, GPU仅仅保留绘制像素的基本功能.
abstract-machine/am/include/amdev.h中为GPU定义了五个抽象寄存器, 在NEMU中只会用到其中的两个:
AM_GPU_CONFIG, AM显示控制器信息, 可读出屏幕大小信息width和height. 另外AM假设系统在运行过程中, 屏幕大小不会发生变化.
AM_GPU_FBDRAW, AM帧缓冲控制器, 可写入绘图信息, 向屏幕(x, y)坐标处绘制w*h的矩形图像. 图像像素按行优先方式存储在pixels中, 每个像素用32位整数以00RRGGBB的方式描述颜色.若
sync为true, 则马上将帧缓冲中的内容同步到屏幕上.VGA设备还有两个寄存器: 屏幕大小寄存器和同步寄存器.
屏幕大小寄存器的硬件(NEMU)功能已经实现, 但软件(AM)还没有去使用它;
同步寄存器软件(AM)已经实现了同步屏幕的功能, 但硬件(NEMU)尚未添加相应的支持.
这里我卡的最久的是1、如何理解隐藏的同步信息 2、如何绘制像素。
针对第一个问题, 其实关键是不理解抽象寄存器是如何与实际硬件寄存器联系起来的。经过RTFSC我们能知道形如“_port_base”(在内存读取中参数为space)才是真正的寄存器位置,而且也在地址空间中开辟了对应的内存。(当然你不仅可以通过开辟的空间去猜测只有两个寄存器,因为你会找到一个newplace(8);同时也可以找到SYNC_ADDR的地址,那里是同步的地址,再配合VGA本体映射的地址猜猜看即可;或者你也可以参考有一个叫做pixel *render的地方,那里也可以参考)
(同时这里我也还不知道指针也可以直接取下标运算,我一直记着指针不等同数组,直到查阅知道了其实编译器中这是一个东西:
除了优先级不同之外,下标表达式 array[ value ] 和间接访问表达式 *(array + ( value )) 是一样的。因此,下标不仅可以用作数组名,也可以用于指针表达式中。不过这样一来,编译器就很难检查下标的有效性。(斟酌)(意思是如果用指针加下标的方式来表达数组的元素,编译器无法检测到是否越界!)
让我们回来继续思考问题,抽象寄存器的编号又是如何与实际寄存器的编号(比如5、6、7和具体的[0] [1])联系起来的呢?
所以,如果实现了AM的同步寄存器但没有硬件支持,说明硬件部分实际上缺少了一个对同步寄存器的读取,那么哪一个才是硬件同步寄存器呢?他在哪呢?这就需要RTFSC了。
针对第二个问题, 实际上pa2021的框架比2020的难,因为2021的native没有办法参考,而2020的native代码给出了绘制实现。这里我是参考了2020的native才做出来的。实际上要理解这一句话:
向屏幕
(x, y)坐标处绘制w*h的矩形图像. 图像像素按行优先方式存储在pixels中
这个x y w h的含义,实际上是从绘制理解的。我们图像的绘制从左上角开始,也就是多维数组展平成一维数据一直画下去(你可以更改fb(i)=[i]的值和for范围查看),而一个好的理解方式是把x,y当做开始绘制的点。也就是说如果你要绘制一个小矩形框,本质是一个点“拖出来的”,因为本质是从一维数组从左到右画。那么我们知道了此时的x,y是基础偏移坐标(也就是绘制小矩形框的基础坐标),而我们绘制需要for循环表达的是i和j坐标也就是小矩形框的坐标,其中pixels是我们将要画的小矩形的像素信息。
我们的目的是把小矩形的像素信息从行开始遍历一个个i和j,再通过fb绘制到大矩形框(gpu内存映射地址)上,所以你应该思考这个映射是怎么做的,如何表达“从某一行开始,一列列的画过去?”,具体的坐标信息该如何转换?这就是你应该思考的了。实在不行,你可以参考2020naitive有关gpu的相关实现。
实现完后你就可以跑马里奥等程序了,我的fps大概是25左右,好好享受自己的作品!
声卡部分
暂时坑了
【做完PA2应该熟悉的代码】(待完成
-
NEMU中除了
fixdep,kconfig, 以及没有选择的ISA之外的全部已有代码(包括Makefile) -
abstract-machine/am/下与$ISA-nemu相关的, 除去CTE和VME之外的代码 -
abstract-machine/klib/中的所有代码 -
abstract-machine/Makefile和abstract-machine/scripts/中的所有代码 -
am-kernels/tests/cpu-tests/中的所有代码 -
am-kernels/tests/am-tests/中运行过的测试代码 -
am-kernels/benchmarks/microbench/bench.c -
am-kernels/kernels/中的hello,slider和typing-game的所有代码
如果你发现自己不能理解这些代码的行为, 就赶紧看看吧. 多看一个文件, bug少调几天, 到了PA3你就会领教到了. (这句话我还是非常相信的,所以宁愿慢一点一个个去看,慢就是快。)
【你应该知道并理解的知识】(待完成
-
程序是个状态机 理解YEMU的执行过程, 具体请参考这里.
-
RTFSC 请整理一条指令在NEMU中的执行过程, 具体请参考这里.
-
程序如何运行 理解打字小游戏如何运行, 具体请参考这里.
-
编译与链接 在
nemu/src/engine/interpreter/rtl-basic.h中, 你会看到由static inline开头定义的各种RTL指令函数. 选择其中一个函数, 分别尝试去掉static, 去掉inline或去掉两者, 然后重新进行编译, 你可能会看到发生错误. 请分别解释为什么这些错误会发生/不发生? 你有办法证明你的想法吗? -
编译与链接
-
在
nemu/include/common.h中添加一行volatile static int dummy;然后重新编译NEMU. 请问重新编译后的NEMU含有多少个dummy变量的实体? 你是如何得到这个结果的? -
添加上题中的代码后, 再在
nemu/include/debug.h中添加一行volatile static int dummy;然后重新编译NEMU. 请问此时的NEMU含有多少个dummy变量的实体? 与上题中dummy变量实体数目进行比较, 并解释本题的结果. -
修改添加的代码, 为两处
dummy变量进行初始化:volatile static int dummy = 0;然后重新编译NEMU. 你发现了什么问题? 为什么之前没有出现这样的问题? (回答完本题后可以删除添加的代码.)
-
-
了解Makefile 请描述你在
am-kernels/kernels/hello/目录下敲入make ARCH=$ISA-nemu后,make程序如何组织.c和.h文件, 最终生成可执行文件am-kernels/kernels/hello/build/hello-$ISA-nemu.elf. (这个问题包括两个方面:Makefile的工作方式和编译链接的过程.) 关于Makefile工作方式的提示:-
Makefile中使用了变量, 包含文件等特性 -
Makefile运用并重写了一些implicit rules -
在
man make中搜索-n选项, 也许会对你有帮助
-
Reference
-
网络上搜到的一些细节,但由于学术诚信不予放出。